Portale "Ingegneria e Campanologia" - Autore - Sommario - Mappa del Sito - Home
![]() Struttura della Campana in movimento
Struttura della Campana in movimento
AREA I - ARTE TECNICO-SCIENTIFICA (ATS)
Cap. ATS-L01 - Dinamica della Campana - Pag. ATS-L01.08
Gli argomenti trattati sono stati inseriti da Ing. Arch. Michele Cuzzoni nel 2012 - © Copyright 2007- 2026- e sono desunti dalla documentazione indicata in Bibliografia a fondo pagina
Simulazione del comportamento dinamico di una Campana
Le campane, oltre che strumenti musicali, sono componenti meccanici soggetti a carichi ripetuti nel tempo e di conseguenza a fenomeni di danneggiamento per fatica.
Tuttavia il carattere empirico – intuitivo della tradizione campanaria fa sì che i parametri di maggiore influenza e le ragioni di tali fenomeni risultino ancora in larga parte sconosciuti.
Obiettivo è condurre delle analisi di tipo strutturale e acustico, al fine di ricavare delle linee guida per la progettazione e l’ installazione di nuove campane nonché per la tutela di quelle esistenti.
La ricerca prevede l’elaborazione di un modello numerico a parametri concentrati del sistema globale campana, batacchio, incastellatura, in grado di simulare diverse condizioni di funzionamento delle campane e di individuare quali siano i parametri maggiormente influenti sulla dinamica del sistema.
Scopo delle simulazioni è quello di definire un set di parametri di funzionamento ottimizzato, in grado di ridurre i fenomeni di danneggiamento sia sulla campana che sul batacchio.
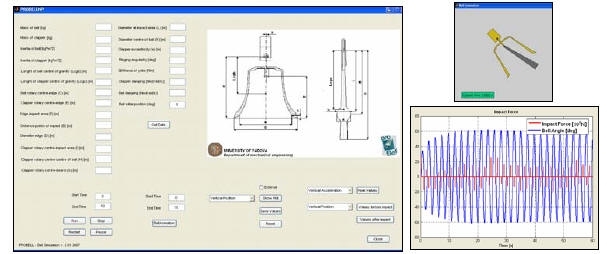
Fig. 1: Interfaccia utente (a sinistra) e esempio di dati di output (a destra) del software per la simulazione del comportamento dinamico di campane.
Per la definizione del modello a parametri concentrati la struttura reale è stata schematizzata come illustrato in Fig. 2: si tratta di un sistema a tre gradi di libertà nelle incognite (coordinate generalizzate): posizione angolare della campana (θb, dove “b” sta per “bell”, inglese per “campana”), posizione angolare del batacchio (θc, dove “c” sta per “clapper”, inglese per “batacchio”) e spostamento verticale della campana (y).
In aggiunta è possibile tenere in considerazione la presenza di una certa eccentricità e tra l’asse del batacchio e l’asse della campana.
Per la scrittura delle equazioni del moto, in ipotesi di corpi rigidi e masse distribuite, si è fatto riferimento al tradizionale approccio basato sulle equazioni di Lagrange:

dove:
qi = sono le coordinate generalizzate (incognite),
T = rappresenta l’energia cinetica totale del sistema,
U = è l’energia potenziale, comprendente l’effetto della gravità e della rigidezza dell’incastellatura ky,
D = è il termine contenente gli elementi dissipativi, quali l’attrito, assunto di tipo viscoso, in corrispondenza delle cerniere della campana e del batacchio (con coefficienti di smorzamento ctb e ctc),
Qi (t) = è il contributo delle forze agenti sul sistema ovvero la coppia Mt(t) fornita dal motore elettrico
Fimp = è la forza d’impatto, generata dal sistema molla-smorzatore rappresentato in Fig. 2
kimp = è la costante elastica di Fimp
cimp = è lo smorzamento viscoso di Fimp
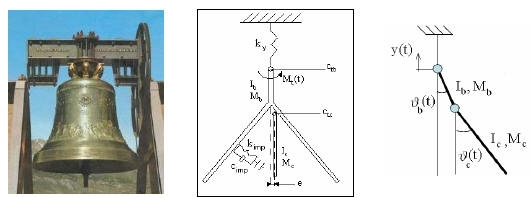
Fig. 2: Struttura reale (a sinistra) e modello a parametri concentrati (al centro). A destra rappresentazione schematica delle tre coordinate lagrangiane.
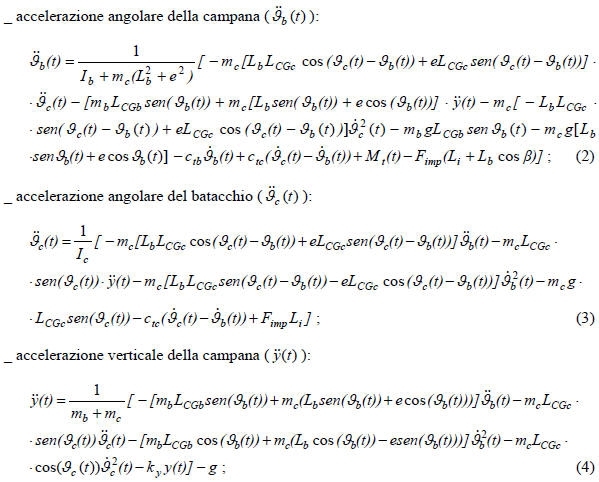
A partire dall’Eq. 1 sono state ricavate, per ciascun grado di libertà, le seguenti espressioni analitiche delle accelerazioni:
dove:
| mb | massa della campana. |
| Ib | momento di inerzia della campana rispetto al proprio asse di rotazione. |
| LCGb | distanza tra l'asse di rotazione della campana e il baricentro della campana stessa (Fig. 3). |
| mc | massa del batacchio. |
| Ic | momento di inerzia del batacchio. |
| LCGc | distanza tra l'asse di rotazione del batacchio e il baricentro del batacchio stesso (Fig. 3). |
| Lb | è la distanza tra l’asse di rotazione del batacchio e quello della campana. |
| Li | è la distanza tra la cerniera del batacchio e il punto di impatto misurata ortogonalmente alla direzione d’impatto. |
| b | rappresenta l’angolo interno della campana. |
| g | è l’accelerazione di gravità. |
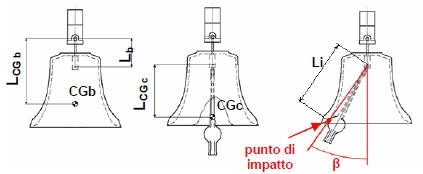
Fig. 3: Schema di campana e batacchio con relative grandezze geometriche.
Il presente modello si differenzia da precedenti studi sulla dinamica di campane [1], innanzitutto per il numero di gradi di libertà considerati, tre anziché due, ovvero non solo le posizioni angolari di campana e batacchio ma anche lo spostamento verticale della campana, nonché per la molteplicità di parametri introdotti quali l’eccentricità del batacchio, la rigidezza dell’incastellatura, gli attriti in corrispondenza delle cerniere.
Infine il presente modello simula l’impatto batacchio-campana e la presenza del motore elettrico.
Per quanto riguarda il modello di impatto, è stata adottata l’ipotesi di un contatto di tipo Hertziano tra sfera (batacchio) di raggio Rc e piastra infinita (campana): al momento dell’impatto si sviluppa una forza elastica proporzionale, in base alla costante elastica kimp, alla penetrazione d tra sfera e lastra (Fig. 4).
La costante kimp dipende, in modo non lineare, dell’entità della penetrazione d, dalla geometria della sfera e dai materiali in contatto. Si ha infatti [2]:

dove:
| ν1 | = | 0,34 | coefficiente di Poisson del bronzo della campana. |
| ν2 | = | 0,3 | coefficiente di Poisson dell'acciaio del batacchio. |
| E1 | = | 110.500 Mpa | modulo elastico del bronzo della campana. |
| E2 | = | 110.500 Mpa [3] | modulo elastico dell'acciaio del batacchio. |
| Cd |
= |
2.4 | coefficiente dipendente dalla geometria. |
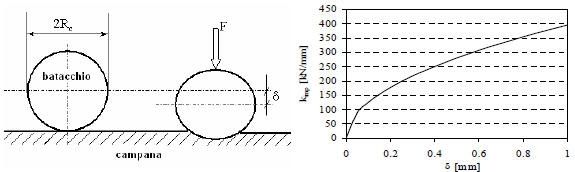
Fig. 4: Rappresentazione schematica dell’impatto batacchio-campana (a sinistra) e andamento della costante elastica kimp in funzione della penetrazione d (a destra).
Per simulare la dissipazione di energia che avviene al momento dell’impatto, è stato introdotto, in parallelo all’elemento elastico di tipo hertziano, un elemento smorzatore, in modo tale che, modificando il valore del coefficiente di smorzamento
cimp, sia possibile modulare la quantità di energia dissipata nell’impatto.Per quanto riguarda invece il motore elettrico preposto all’azionamento della campana, è stato implementato nel programma un sistema basato essenzialmente su un controllore PID: il programma infatti, tramite un’apposita funzione, rileva l’errore tra la posizione angolare massima raggiunta dalla campana e l’angolo di oscillazione desiderato, mentre un controllore PID elabora tale errore ed emette un segnale di coppia che, adeguatamente amplificato, viene inserito nelle equazioni di Lagrange della campana.
Sulla base dei suggerimenti di una ditta specializzata in installazioni di campane, l’azione del motore si sviluppa durante la sola fase di salita della campana per un angolo di 15° a partire dalla posizione verticale e l’entità della coppia
Mt(t) fornita alla campana è tale da farle raggiungere l’ampiezza di oscillazione voluta dopo 10÷15 attivazioni del motore.
Per l’integrazione numerica delle equazioni del moto il modello è stato implementato in linguaggio Matlab-Simulink. Tale software permette di risolvere numericamente equazioni differenziali rappresentandole in forma grafica, tramite un approccio di tipo ‘flow-chart’, ovvero basato sulla logica degli schemi a blocchi.
Il programma è organizzato in più sottosistemi interconnessi (Fig. 5), ciascuno dei quali elabora, a partire dai dati di ingresso, un insieme più o meno complesso di funzioni fornendo quindi determinati risultati in uscita.
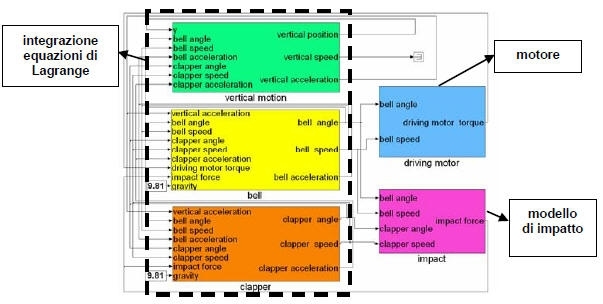
Fig. 5: Implementazione in linguaggio Matlab Simulink del modello fisico-matematico per la simulazione della dinamica di campane.
Dei 5 sottosistemi che caratterizzano il modello globale, tre (uno per grado di libertà) sono preposti all’integrazione delle equazioni di Lagrange, uno implementa il modello di impatto e uno la logica di funzionamento del motore elettrico.
A titolo di esempio si riporta in Fig. 6 l’implementazione in Simulink della logica di funzionamento del motore elettrico.
Il sottosistema “motore” riceve come segnale di ingresso l’evoluzione nel tempo della posizione angolare della campana, quindi un insieme di blocchi rileva la posizione angolare massima raggiunta e calcola l’errore tra la posizione massima effettiva e l’angolo di oscillazione desiderato. Tale errore viene fornito in ingresso ad un blocco che implementa al suo interno un controllore PID per dare in uscita un segnale che adeguatamente amplificato e fatto agire negli intervalli di oscillazione opportuni (blocchi “amplificazione-regolazione”) diventa un segnale di coppia che esce dal sottosistema motore per entrare poi nel sottosistema preposto all’integrazione delle equazioni di Lagrange della campana.
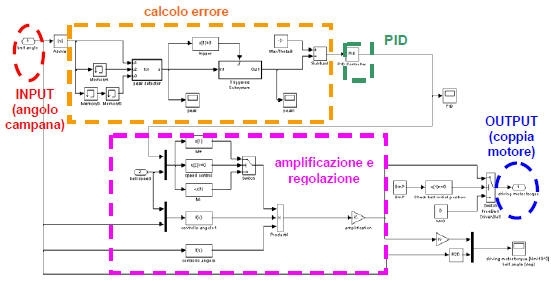
Fig. 6: Implementazione in linguaggio Matlab Simulink della logica di funzionamento del motore elettrico per la movimentazione delle campane.
Si precisa che il modello Simulink rimane nascosto al semplice utilizzatore del software che si interfaccia con il programma tramite il pannello per la gestione e lo scambio dei dati di input-output descritto al paragrafo precedente.
Come si evince dalla descrizione del programma, prima di avviare le simulazioni, il software necessita di una fase di calibrazione per definire il valore dei numerosi parametri introdotti nel modello. Mentre alcuni dati quali la rigidezza dell’incastellatura e l’eccentricità del batacchio, vengono misurati direttamente sulla campana reale [4] o assunti sulla base di un database di valori noti nel caso di campane in fase di progettazione, altri parametri necessitano di una taratura ad hoc.
Particolarmente rilevante per la dinamica del sistema è la definizione del coefficiente di smorzamento cimp che regola la dissipazione di energia durante l’impatto. A questo scopo fanno da riferimento i test sperimentali effettuati presso l’università di Kempten, partner tedesca del progetto [5], al fine di riprodurre in modo controllato e misurabile l’impatto batacchio-campana.
Le prove sperimentali erano costituite essenzialmente da test di caduta di un cilindro di acciaio di diametro 80 mm, altezza 270 mm, raggio di impatto 50 mm e massa pari a 10 kg (corrispondente alla massa di un batacchio per una campana di circa 200 kg), su una lastra di bronzo di spessore 50 mm (Fig. 7): il cilindro, lasciato cadere da un altezza di 100 mm, arrivava in contatto con la lastra di bronzo con un’ accelerazione di circa 500 g per una durata dell’impatto pari a 0.6 ms, valori molto simili a quelli rilevati sperimentalmente per una campana delle dimensioni suddette.
Nota l’altezza iniziale, dalla misura dell’altezza aggiunta dal cilindro dopo l’impatto, è stato possibile stimare una dissipazione di energia durante l’urto pari al 95%. Sulla base di questi risultati sperimentali, nel programma di simulazione, adottando una configurazione di moto libero, ovvero libere oscillazioni della campana da un angolo di 60° in assenza di motore e di attriti, viene modificato il valore del coefficiente cimp fino ad ottenere un’energia cinetica del batacchio dopo l’urto pari al 5% del valore rilevato prima dell’impatto.
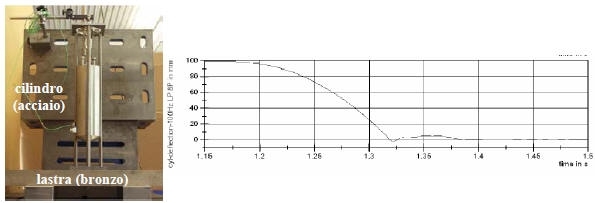
Fig. 7: Apparato sperimentale per i test cilindro - piastra (a sinistra) e andamento nel tempo della posizione del cilindro (a destra).
Per quanto riguarda gli attriti in corrispondenza delle cerniere, il valore del coefficiente di smorzamento
ctc in corrispondenza della cerniera del batacchio viene determinato sulla base di dati sperimentali ottenuti sulla campana reale portando il batacchio in contatto con la campana, lasciandolo libero di oscillare e misurando la diminuzione dell’ampiezza di oscillazione su periodi successivi [4].Nel caso di simulazioni di campane ancora in fase di progettazione, si effettua una stima tenendo conto che i valori ricavati sperimentalmente risultano sempre inferiori al 5% del valore di smorzamento critico.
Viceversa il coefficiente di smorzamento ctb
in corrispondenza della cerniera della campana viene determinato numericamente imponendo che un pendolo semplice avente le stesse caratteristiche geometriche e inerziali della campana in questione si arresti dopo circa 40 oscillazioni libere a partire da un angolo di 60° dalla verticale.Infine, i guadagni del controllore PID vengono variati manualmente, tramite alcune simulazioni di tentativo, in base ai parametri fisici della simulazione fino ad ottenere, come detto precedentemente, una durata della fase di avviamento pari a circa 10 attivazioni del motore.
Per validare il programma si è fatto riferimento a campane realmente esistenti delle quali sono disponibili i dati sperimentali delle accelerazioni di impatto [6]. Sono state simulate 4 campane, tre delle quali (codici b1-1, b4-5, b7-4) situate presso i laboratori dell’università di Kempten, e una (codice bM-3) installata ad Oberbozen (Bolzano), con 16 differenti batacchi (vedi Tav. 1), modificando le condizioni di funzionamento, ovvero variando l’angolo di oscillazione e l’eccentricità del batacchio, per un totale di circa 73 simulazioni.
Si riporta in Tav. 1 il piano complessivo delle simulazioni completo di descrizione sommaria dei diversi batacchi simulati. Si precisa che tutte le simulazioni relative alla campana 1-1 sono state ripetute due volte, la prima con valore nullo dell’eccentricità del batacchio, la seconda con un’eccentricità pari a 13 mm. Inoltre per la campana bM-3 sono state condotte, oltre alle simulazioni con il batacchio reale cM-4, ulteriori 10 simulazioni relative a 5 batacchi differenti, ciascuno per due diversi angoli di oscillazione.
Per tutte le simulazioni è stato utilizzato un metodo di integrazione a passo variabile, impostando una durata delle simulazioni corrispondente a 90 secondi di oscillazione della campana, al fine di ottenere, una volta depurati i risultati dal transitorio iniziale di avviamento, almeno 60 secondi di oscillazione stabilizzata. Con queste caratteristiche ciascuna simulazione richiede un tempo di calcolo di circa 30 minuti con un processore Intel(R) Pentium(R) M processor, 1.6 GHz, 512 MB di RAM. La dimensione totale dei file di output è di circa 150MB.
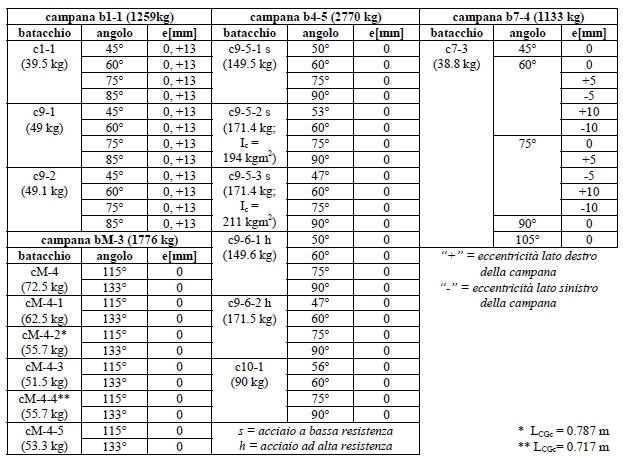
Tav. 1: Piano delle simulazioni svolte.
Per quanto riguarda l’attendibilità dei risultati ottenuti, è stata riscontrata una buona corrispondenza tra risultati numerici e valori sperimentali per angoli di oscillazione della campana maggiori di 60°, come si può notare in Fig. 8 per la campana b7-4.
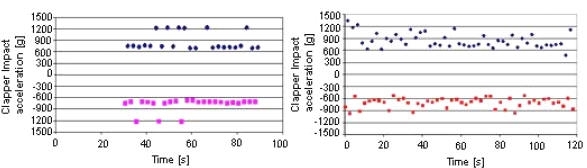
Fig. 8: Confronto tra accelerazioni di impatto del batacchio ricavate numericamente (a sinistra) e sperimentalmente (a destra) per la campana b7-4, angolo di oscillazione 90°.
Riducendo l’angolo di oscillazione a 60° circa, il valore medio delle accelerazioni d’impatto risulta maggiormente influenzato dai parametri del controllore PID che simula il motore. Per bassi angoli di oscillazione si osserva infine che le simulazioni non forniscono condizioni di funzionamento stabilizzate, in quanto mancano numerosi impatti, anche se il valore medio delle accelerazioni rispetta quanto rilevato sulle campane reali (Fig. 9).
Dopo aver verificato l’attendibilità del programma, è stata indagata l’influenza che vari parametri del modello hanno sul valore medio delle accelerazioni di impatto, grandezza ritenuta correlata alle possibilità di danneggiamento sia della campana che del batacchio.

Fig. 9: Confronto tra accelerazioni di impatto del batacchio ricavate numericamente (a sinistra) e sperimentalmente (a destra) per la campana b7-4, angolo di oscillazione 45°.
Sulla base dei risultati ottenuti si evince una chiara dipendenza del valore medio delle accelerazioni di impatto dall’angolo di oscillazione della campana e dal rapporto tra il momento di inerzia della campana (Ib) e quello del batacchio (Ic): all’aumentare del momento d’inerzia del batacchio rispetto a quello della campana il valore medio delle accelerazioni di impatto aumenta con legge di tipo polinomiale.
Tale andamento (Fig. 10a) è riscontrabile a diversi angoli di oscillazione della campana, con valori delle accelerazioni che risultano tanto maggiori, ovvero con condizioni medie di funzionamento tanto più gravose, quanto maggiore è l’angolo di oscillazione della campana.
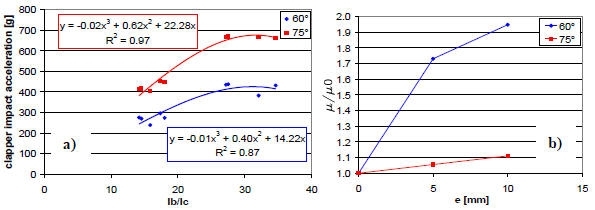
Fig. 10
a): Andamento del valore medio delle accelerazioni di impatto del batacchio in funzione del rapporto tra il momento di inerzia della campana (Ib) e quello del batacchio (Ic) per angoli di oscillazione di 60° e 75°.
b): andamento delle accelerazioni di impatto espresso come rapporto tra il valor medio (μ) ottenuto con una certa eccentricità e ed il valor medio ad eccentricità nulla (μ0) per angoli di oscillazione della campana di 60° e 75°.
Dalle simulazioni effettuate è emerso inoltre che un aumento dell’angolo di oscillazione della campana oltre i 90° risulta una scelta non ottimale per il funzionamento del sistema campana – batacchio non solo dal punto di vista delle accelerazioni di impatto, oltremodo gravose, ma anche dal punto di vista della regolarità del moto. Infatti per angoli di oscillazione così elevati risulta frequente il manifestarsi di impatti multipli (Fig. 11), che oltre a costituire un’aggravante dal punto di vista strutturale, modificano le qualità acustiche della campana .
Per quanto riguarda l’effetto di un’eventuale eccentricità tra l’asse del batacchio e quello della campana, parametro ritenuto particolarmente interessante dato il carattere ad oggi ancora fortemente artigianale della tradizione campanaria, si è visto che tale parametro risulta rilevante per bassi angoli di oscillazione della campana, ovvero attorno ai 60°; in quanto, in queste condizioni, soli 10 mm di eccentricità causano un aumento pari quasi al 100% del valor medio delle accelerazioni di impatto del batacchio.
Tuttavia, solo aumentando l’angolo di oscillazione della campana da 60° a 75°, il fenomeno risulta molto meno rilevante, come si può notare Fig. 10b, in cui viene visualizzato, per i due angoli di oscillazione della campana, l’andamento delle accelerazioni di impatto espresso come rapporto tra il valor medio (μ) ottenuto con una certa eccentricità e ed il valor medio ad eccentricità nulla (μ0).

Fig. 11: Posizione angolare della campana b7-4 e forze di impatto a due differenti angoli di oscillazione (60°, a sinistra e 105°, a destra). Si noti a 105° la presenza di impatti multipli.
Il presente lavoro permette di affermare la possibilità di studiare il comportamento dinamico di campane da chiesa tramite l’utilizzo di un programma basato sull’implementazione numerica di un modello a parametri concentrati della struttura reale campana – batacchio - incastellatura.
Il programma è stato validato mediante confronto delle accelerazioni d’urto ottenute numericamente su oltre 70 simulazioni con i corrispondenti valori sperimentali.
L’accelerazione d’urto infatti è ritenuta strettamente correlata alle possibilità di danneggiamento sia della campana che del batacchio. L’utilizzo del programma consente quindi di definire set di parametri di funzionamento ottimizzati in grado di ridurre i fenomeni di danneggiamento, supportando quindi sia la progettazione di nuove campane che la protezione di quelle esistenti.
Portale "Ingegneria e
Campanologia" -
Autore -
Sommario
- Mappa del Sito -
Home
Bib-TS-000 - Testo di Ing. Arch. Michele Cuzzoni
Bib-TS-278 - G. Meneghetti, M. Ricotta, B. Rossi - Definizione di un programma per la simulazione del comportamento dinamico di Campane da Chiesa. - Edito in occasione del convegno promosso dall'Associazione Italiana per l’Analisi delle Sollecitazioni (AIAS): XXXVI Convegno Nazionale – 4-8 Settembre 2007 - Università degli Studi di Napoli Federico II – Seconda Università degli Studi di Napoli.
Bib-TS-279 - [1] – S. Ivorra, M. J. Palomo, G. Verdù, A. Zasso: Dynamic forces produced by swinging bells, Meccanica, pp. 47-62 (2006).
Bib-TS-280 - [2] – K. L Johnson: Contact mechanics, Cambridge University Press (1987).
Bib-TS-281 - [3] – C. Rossi: Analisi numerica delle qualità acustiche di una campana da chiesa, Tesi di laurea, Dipartimento di Ingegneria Meccanica, Università di Padova (AA 2004-2005).
Bib-TS-282 - [4] – A. Rupp, M. Plitzner: Experimental determination of dynamic parameters of bells and clappers, Technical Report RTD12-02, Cooperative Research Project Probell EC 015684 (15.09.2006).
Bib-TS-283 - [5] – A. Rupp, S. Thieme: Cylinder to block test, Technical Report RTD12-06, Cooperative Research Project Probell EC 015684 (12.10.2006).
Bib-TS-284 - [6] – A. Rupp: Confidential report (07.2006).