Portale "Ingegneria e Campanologia" - Autore - Sommario - Mappa del Sito - Home
![]() Principi generali di analisi acustica
Principi generali di analisi acustica
AREA I - ARTE TECNICO-SCIENTIFICA (ATS)
Cap. ATS-J01 - Acustica - Pag. ATS-J01.06
Gli argomenti trattati sono stati inseriti da Ing. Arch. Michele Cuzzoni nel 2009 - © Copyright 2007- 2025- e sono desunti dalla documentazione indicata in Bibliografia a fondo pagina
Analisi in frequenza e di stabilità con Matlab
Scopo di questi appunti: imparare a usare MATLAB per analizzare le risposte di sistemi dinamici LTI a tempo continuo nel dominio della frequenza e per fare semplici analisi di stabilità di sistemi retroazionati.
Contenuto del testo:
-
sistemi interconnessi in MATLAB;
-
calcolo di risposte in frequenza;
-
correlazione con il dominio del tempo;
-
diagrammi di Bode e polari;
-
analisi di stabilità di sistemi retroazionati (nelle ipotesi di Bode e non);
- conclusioni.
Esempi (serie, parallelo, retroazione):
» S1=ss(-2,1,1,0);
» S2=tf(1,conv([10 1],[1 1]));
» S3=tf(0.1,[5 1]);
» S4=tf(S1+S2*S3/(1+S2*S3))
Transfer function:
s^6 + 2.6 s^5 + 2.332 s^4 + 0.8806 s^3 + 0.1628 s^2 + 0.01476 s +0.00052
---------------------------------------------------------------
s^7 + 4.6 s^6 + 7.53 s^5 + 5.534 s^4 + 1.905 s^3 + 0.3274 s^2 +0 .02732 s + 0.00088
Si calcoli una risposta in frequenza con la definizione (immagine tramite la FdT del semiasse I+) e a plottarne modulo (in scala logaritmica) e fase (in gradi) avendo per ascissa (logaritmica) la pulsazione.
La funzione polyval serve a valutare un polinomio; loglog e semilogx[y] sono di funzionamento intuitivo.
» num=[10 1];
» den=conv([1 1],[100 1]);
» j=sqrt(-1);
» w=logspace(-4,2,500);
» RF=polyval(num,j*w)./polyval(den,j*w);
» mRF=abs(RF);
» fRF=angle(RF);
» subplot(211); loglog(w,mRF);
» subplot(212); semilogx(w,fRF/pi*180);
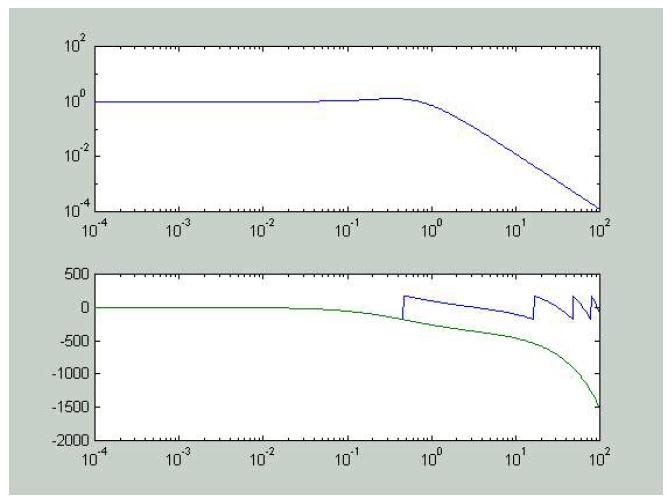
Altro esempio: si calcoli e plotti modulo e fase della risposta in frequenza di:
» num=[-5 1]; den=conv([1 1],conv([2 1],[2 1])); d=0.2;
» j=sqrt(-1);
» w=logspace(-4,2,500);
» RF=polyval(num,j*w)./polyval(den,j*w).*exp(-d*j*w);
» mRF=abs(RF);
» fRF=angle(RF);
» fRFu=unwrap(fRF); (evita la riduzione al 1° giro)
» subplot(211); loglog(w,mRF);
» subplot(212); semilogx(w,fRF/pi*180,w,fRFu/pi*180);
Risultato:
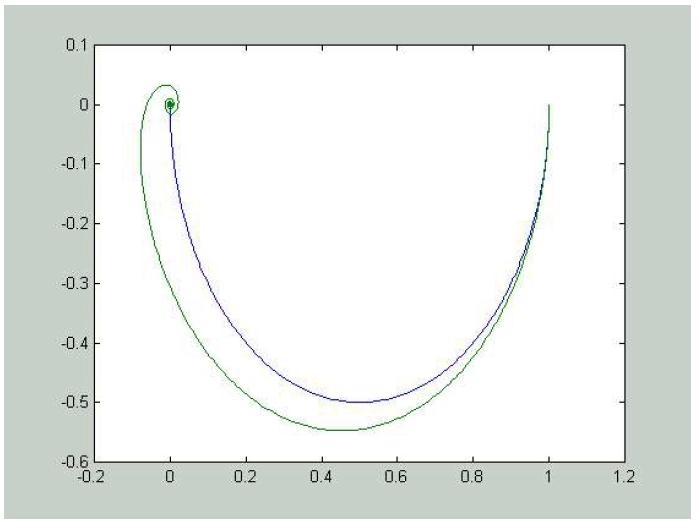
Si prendano adesso le due funzioni di trasferimento:
si calcolino le risposte in frequenza e si rappresentino nel piano complesso come curve punteggiate dalla pulsazione:
» num=1; den=[1 1]; d=0.1;
» w=logspace(-3,6,1000);
» RF1=polyval(num,j*w)./polyval(den,j*w);
» RF2=RF1.*exp(-d*j*w);
» plot(real(RF1),imag(RF1),real(RF2),imag(RF2));
Risultato:
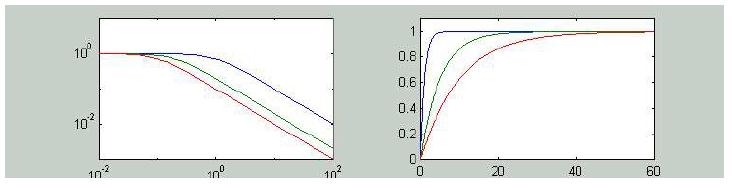
Relazione tra banda passante e velocità di risposta:
» w=logspace(-2,2);
» m1=abs(1./polyval([1 1],sqrt(-1)*w));
» m2=abs(1./polyval([5 1],sqrt(-1)*w));
» m3=abs(1./polyval([10 1],sqrt(-1)*w));
» t=0:0.1:60;
» y1=step(tf(1,[1 1]),t);
» y2=step(tf(1,[5 1]),t);
» y3=step(tf(1,[10 1]),t);
» subplot(121); loglog(w,m1,w,m2,w,m3);
» axis([w(1) w(end) 1e-3 10]);
» subplot(122); plot(t,y1,t,y2,t,y3);
» axis([t(1) t(end) 0 1.1]);
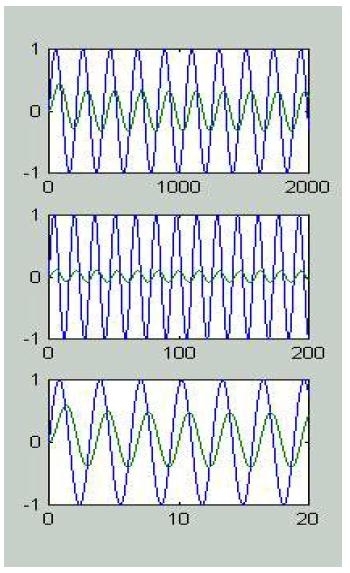
Misura di modulo e sfasamento della risposta in frequenza ad una data pulsazione:
» G=tf([10 1],conv([1 1],[100 1]));
» w1=0.03; » w2=0.4; » w3=2;
» t1=0:2000;
» t2=0:0.1:200;
» t3=0:0.01:20;
» u1=sin(w1*t1);
» u2=sin(w2*t2);
» u3=sin(w3*t3);
» y1=lsim(G,u1,t1);
» y2=lsim(G,u2,t2);
» y3=lsim(G,u3,t3);
» subplot(311); plot(t1,u1,t1,y1);
» subplot(312); plot(t2,u2,t2,y2);
» subplot(313); plot(t3,u3,t3,y3);
» subplot(313); plot(t3,u3,t3,10*y3);
Usando lo strumento di zoom si evidenzino le ultime oscillazioni dei movimenti forzati che si sono calcolate e si valutino:
-
l'ampiezza |Y| dell'uscita e
-
la distanza temporale D tra i massimi corrispondenti di questa e dell'ingresso (ovviamente col segno + se in anticipo, - se in ritardo).
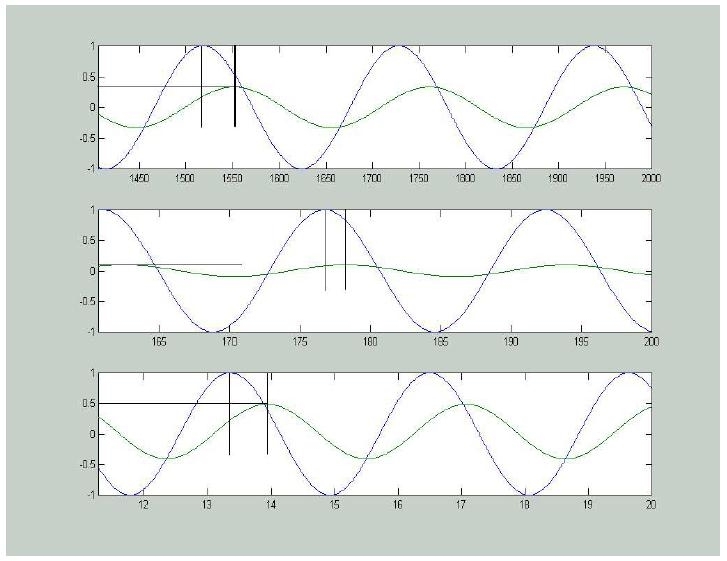
Risultati:
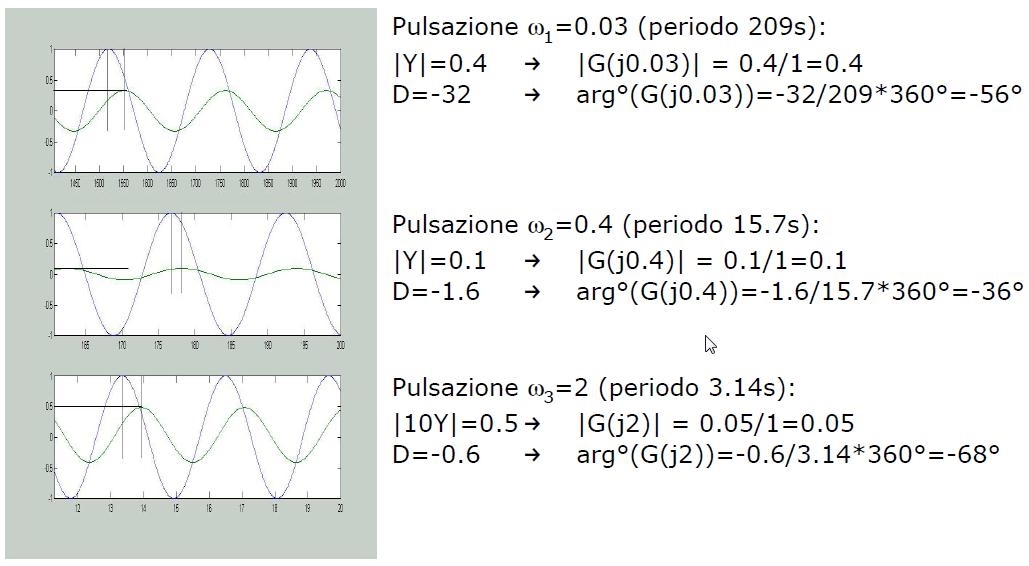
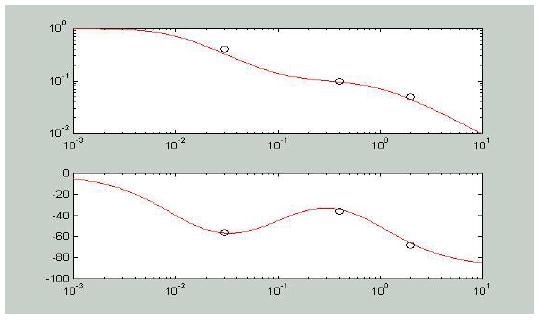
Si verifichi osservando la risposta in frequenza calcolata:
» w=logspace(-3,1,1000); j=sqrt(-1);
» RF=polyval([10 1],j*w)./polyval(conv([1 1],[100 1]),j*w);
» m=abs(RF); f=angle(RF)/pi*180;
» subplot(211);
» loglog(w,m,'r',[w1 w2 w3],[0.4 0.1 0.05],'ok');
» subplot(212);
» semilogx(w,f,'r',[w1 w2 w3],[-56 -36 -68],'ok');
Tre comandi utili:
Il comando bode calcola e/o traccia a video i diagrammi di Bode;
Il comando nyquist calcola e/o traccia a video il diagramma di Nyquist;
Il comando margin calcola i margini di fase e guadagno data la funzione di trasferimento d'anello e/o li mostra a video sui relativi diagrammi di Bode.
Un paio di esempi semplici:
Analizzare con Nyquist la stabilità del sistema di controllo in retroazione negativa con P(s)=1/((s+10)(s-3)) e R(s)=1 (è instabile);
determinate un regolatore in retroazione (negativa) R(s) che renda asintoticamente stabile il sistema in anello chiuso;
ATTENZIONE:
-
non si è nelle ipotesi di Bode e si deve usare il criterio di Nyquist,
-
non si può cancellare il polo instabile;
SOLUZIONE: ad esempio R(s)=50, che fa fare al diagramma di Nyquist della risposta in frequenza di L=RP un giro antiorario attorno al punto -1.
-
Si è visto come rappresentare sistemi interconnessi e come calcolare e rappresentare risposte in frequenza in MATLAB.
-
Si è correlato, in modo semplice e non esaustivo, i domini del tempo e della frequenza.
-
Si è fatta analisi di stabilità nelle ipotesi di Bode e non, vedendo anche un semplice esempio di stabilizzazione con uso del criterio di Nyquist.
Portale "Ingegneria e
Campanologia" -
Autore -
Sommario
- Mappa del Sito -
Home
Bib-TS-197 - Appunti di Laboratorio di Fondamenti di Automatica, Terza esercitazione. Politecnico di Milano, AA. 2004 / 2005